February 7, 2025
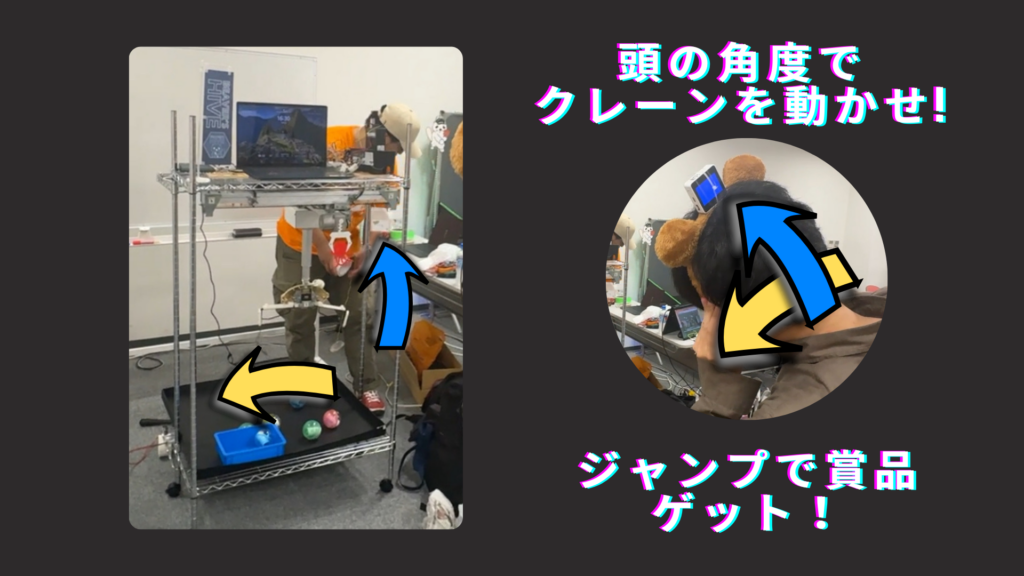
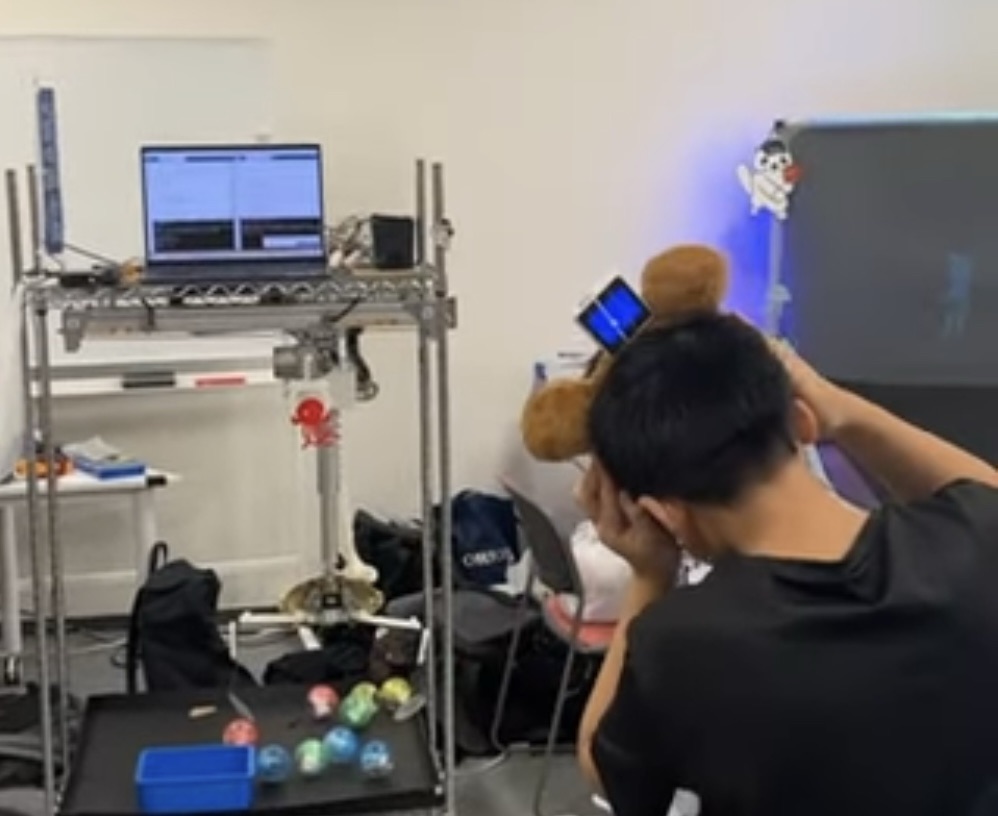
猫耳のようなヘアバンドを頭に着けた少年が首をかしげて目の前のUFOキャッチャーをのぞき込んでいる。UFOキャッチャーの中には数個のカプセルが転がっていて、そのひとつに狙いをさだめながらクレーンを自在に操っているようだ。驚いたことに手を使わずにクレーンを操作している。
Beaver’s Hiveロボット開発チームに直撃取材するシリーズ第3回。新しい入力方式のUFOキャッチャーをひとりで作り上げた開発担当者にお話を聴く。
筆者: (後述のリンク先動画[1]を見ながら)これは何のコンテストに出たときのものですか?
開発担当: これは2024年のTechSeeker HACKATHON(テックシーカーハッカソン)に出たときのやつですね。
筆者: UFOキャッチャーの右にあるのが、ずんだもんのキャッチボールロボ(第1回参照)でそれと一緒に出展したんだ!
開発担当: はい。
筆者: この時のテーマは「未来の子供の遊び」を考えて具体的なモノにしてくださいということでしたね。
開発担当: そうです。
筆者: Beaver’s Hiveチームとしてはもともとキャッチボールロボを考えて作っていたんだと思いますが、このUFOキャッチャーはどのように思いついたんですか?
開発担当: ハッカソンの中でですね、アイディアを出してもらうために運営側の人が「こんなんどうですか?」といろいろ提案してくれるワークショップがありまして……。
筆者: はい。
開発担当: (大阪日本橋の)シリコンハウスに実際に行ってその様子を中継してくれるのですが、その中でデジットさん(シリコンハウス3階)にこのUFOキャッチャーキットが1,500円ぐらいであるよっていうことでそれがけっこう盛り上がったんです。
筆者: 楽しそう(笑)
開発担当: 「誰かこれ使わないですか?」みたいなそういう雰囲気があったんでじゃあやってみようと思って作ったんです。
筆者: そういう経緯だったんだ。
開発担当: ハッカソンのテーマとしてはちょっと弱いかなっていうのは思っていたんですけど、ただそのハッカソンっていう大会全体として、催しとしてはこういうものがウケがいいかなと思って作ってみたって感じですね。
筆者: ということはBeaver’s HiveチームとしてはこのUFOキャッチャーとキャッチボールロボとで未来の遊びを提案したということなんですね。
開発担当: そんな感じですね。こっちのUFOキャッチャーに関してはそのハッカソンやるときに作りますってアナウンスもせずに当日急に持って行ったみたいな(笑)
筆者: えええっ!?
開発担当: UFOキャッチャーキット使いましたよ!作りましたよって当日見せて「お!作れるんだ!」みたいな(笑)
筆者: 主催者も知らないメカが当日いきなり出てきた(笑)
開発担当: そうです(笑)。ちょこっと(作ろうかなという)話とか出してたんですけど。公としてうちはキャッチボールロボとUFOキャッチャーを両方作りますっていうよりは、どちらというとキャッチボールロボメインでUFOキャッチャーは(ついでに)ちょっとやってみようかなという感じでやってました。
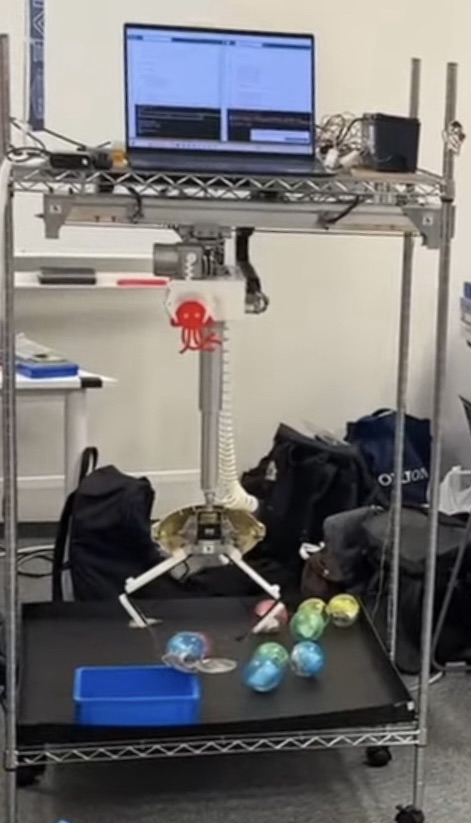
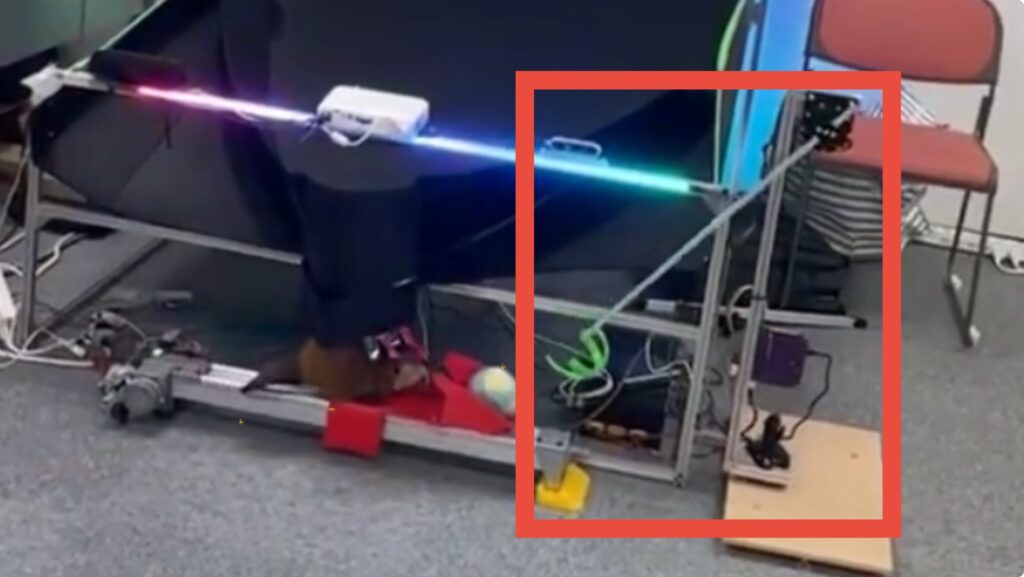
筆者: これ、天井部分に前後左右にクレーンを動かすレールがあって、そこからアーム部分が下がっているように見えます。キットにはこれらの部品が一式入ってたんですか?
開発担当: そうです。 UFOキャッチャーなのでX軸とY軸とZ軸が動くと思うんですけど、そのX軸とY軸のレールと、本体のアーム部分の上げ下げと、アーム部分の開く機構がひとつのセットになっています。
筆者: そうなんだ。
開発担当: ただ、このアームの先っぽのツメの部分とか、アームのカバー部分っていうのは外された状態で売られていたんですね。
筆者: ツメとカバーはなかったんだ。
開発担当: 僕が自作したところでいうと、筐体(外側の箱)部分と、アームの先のツメの部分は作りました。
筆者: なるほど。外側のフレームはホームセンターで売ってる棚ですね。
開発担当: スチールラックですね。
筆者: よく観るとアーム部分にカバーが取り付けてある。
開発担当: はい。
筆者: それで制御用コンピューターの部分も作ってひとつのUFOキャッチャーマシンとして仕上げたということですね。
開発担当: そうです。
筆者: そのコンピュータのプログラムも全部作ったんですか?
開発担当: そうです。基本的にプログラムも自分でやってますが一ヶ所だけチームメンバーに手伝ってもらいました。コントローラー部分のM5Stack(小型マイコンモジュール)のプログラムは協力して作ってもらいました。
筆者: なるほど。(動画をみながら)今プレイしてる少年が頭に何か着けているんですけど……。
開発担当: はい。
筆者: これはプレイヤーの頭の動きでUFOキャッチャーが動く?
開発担当: そうです。 M5Stackに入っている加速度センサーを使って頭の傾きとジャイロセンサーを使ってジャンプしたときの動きを検出しています。
筆者: ゲームセンターに置いてあるUFOキャッチャーだとコインを入れてスタートボタンを押すとアームが横に動き出して、プレイヤーがボタンで操作できる範囲といってもせいぜい奥行きを変えたりとかのX軸・Y軸の動き程度で、あとはどこで景品をつかむか?しかありませんよね。
開発担当: はい。
筆者: このUFOキャッチャーはどういう風に操作するんですか?

開発担当: えーと、頭を右に傾けるとアームが右に動いて、お辞儀するみたいに前に行くとアームが奥に行きます。
筆者: はい。

開発担当: 後ろにそり返るとアームが手前に来ます。
筆者: 前後左右のアームの移動をプレイヤーの頭の傾きで指令するんですね。
開発担当: そうです。
筆者: それで動画をみると少年がジャンプしてるんですけど、プレイヤーがジャンプするとどうなるんですか?
開発担当: ジャンプするとアームがそこから下がって、カプセルをキャッチする一連の動作になります。
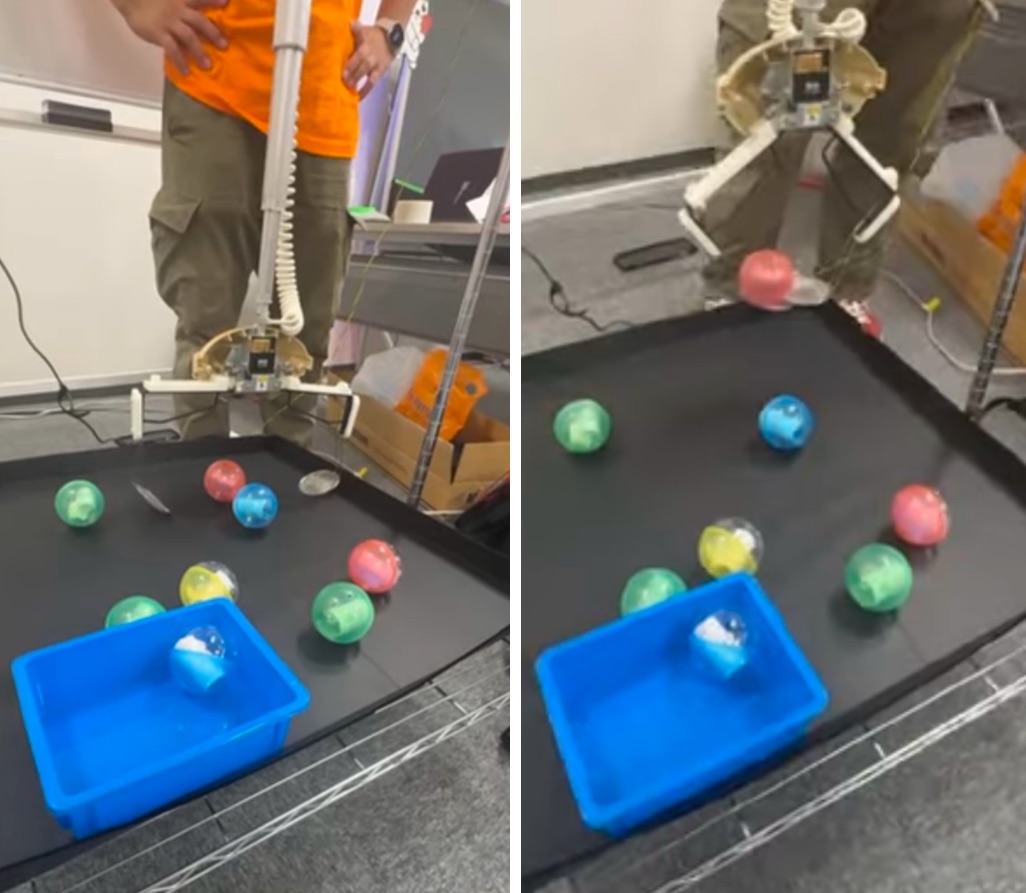
筆者: (動画を観ながら)アームがカプセルを拾って取り出し口となる青い箱まで運んでくれるんですね。
🦫
次回予告
筆者: 開発にあたって苦労はありましたか?
開発担当: えーと、けっこう何ヶ所かあって……。
次回は開発者インタビュー第4回 UFOキャッチャー(後編)、お楽しみに!
リンク(動画)
[1] Beaver’s Hive、頭の傾きで操作できるUFOキャッチャー作ってみた、URL https://youtube.com/shorts/9sORvFnI8Ok?si=q5YJ1rh2uhLXTPdl

GNG