January 5, 2025
アリエクでモータを買ったはいいものの、実物が届くまで詳細設計が進まない。
なんてこと、よくあります。
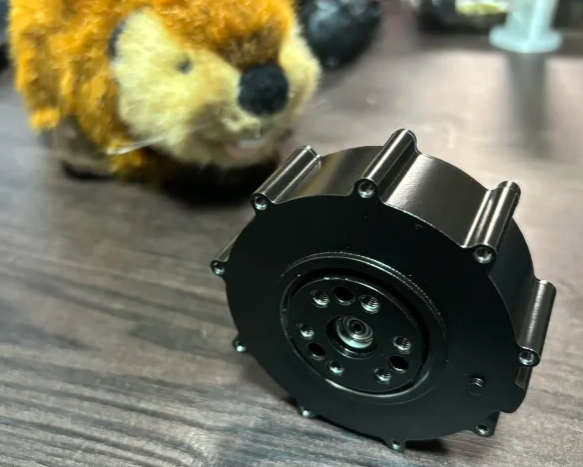
昨年ビーバーがお世話になったBLDCモータのCyberGear(Xiaomi)の取り付けについてまとめようと思います。
●CyberGearとは-
・出力:100W
・保持トルク:4.0Nm
・ピークトルク:12Nm
・最大回転数:296rpm±10%
*専用のケーブルは別売りです。
https://www.mi.com/cyber-gear
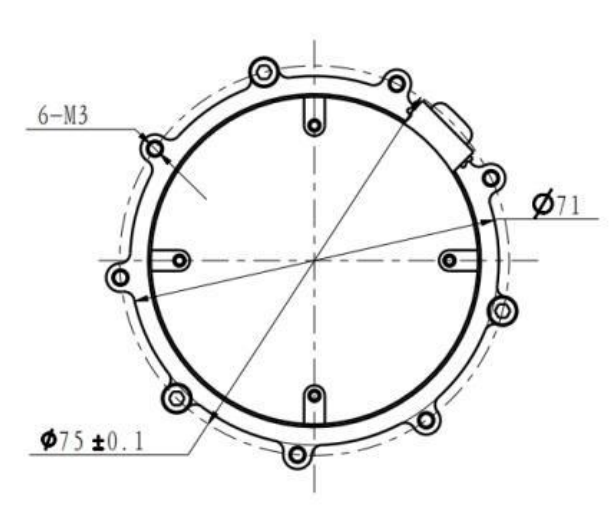
基本的には公式の図面通りです。ロータ部の外径はΦ33。
中国の図面なので第一角法ですね。
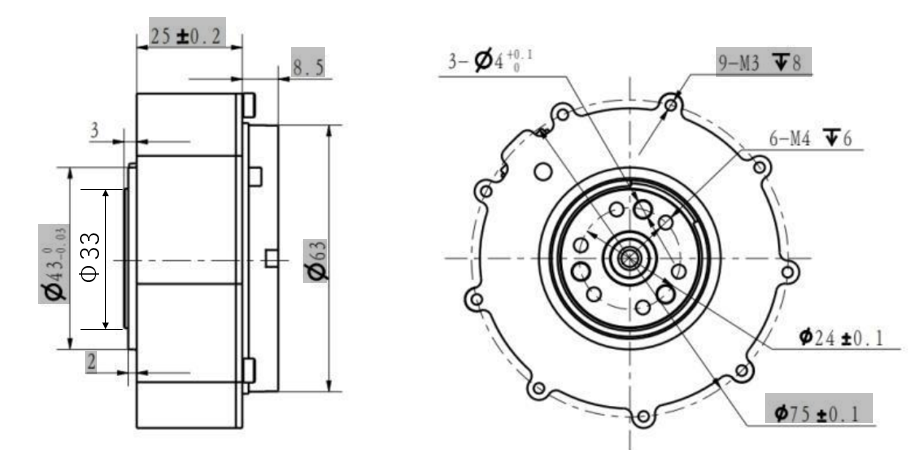
こちらはΦ43のインロー部で位置決めしつつ9カ所のM3で固定します。
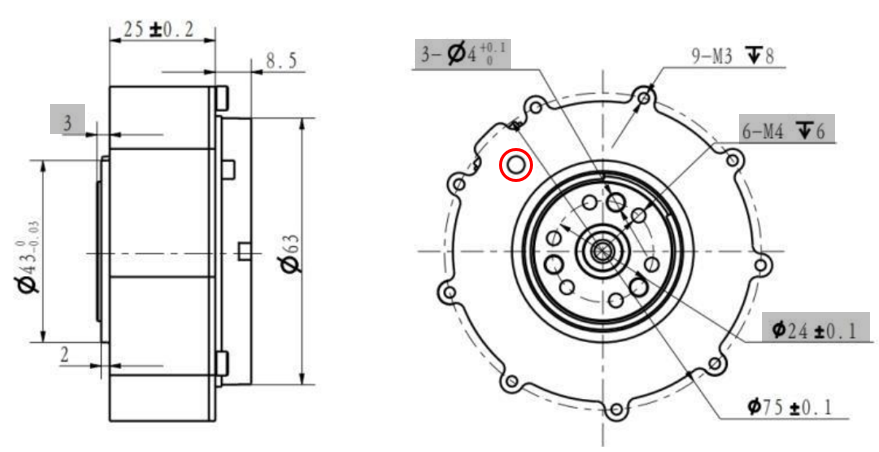
図面には寸法があがってませんが、赤丸部はΦ4、高さ1.8のでっぱりになっており、
インロー部の回り止めに使用します。寸法公差はわかりません。
背面は正面と同様に9カ所M3が設けられてまが、内3カ所はケースを固定するために
使用されております。ケース用のキャップボルトを外して別部品と共締めもできそうですが、
自己責任でお願いします。
以上、本記事がCyberGearの設計にお役に立てればと思います。
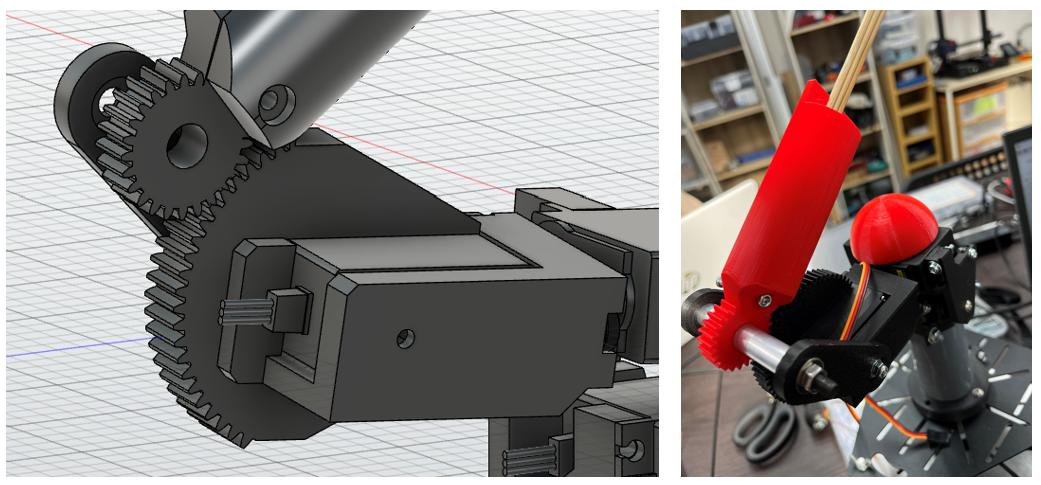
最後にロボットに組み込んだ様子を紹介させていただきます。
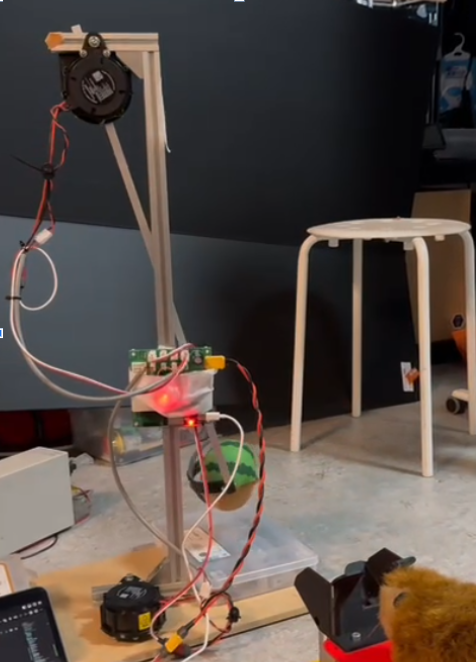
・CatchBall ROBO with Beaver
投球ロボットにCyberGearを使用しております。
>動画はこちら
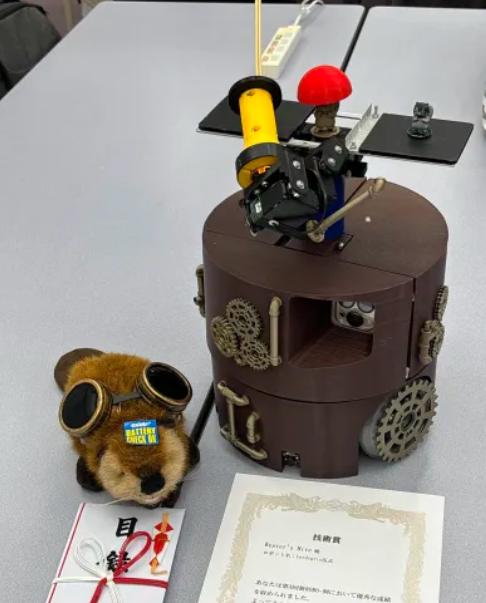
・スーパービーバー戦車ロボ
CoREに出場した機体です。改造してMaker Faire Kyoto 2024にも出展しました。
足回りに4つ組み込みました。

・Verdigris伍式
ホイール2カ所と胴体の回転に1カ所使いました。


スギヤマ