December 29, 2022
四足歩行ロボットといえばBostonDynamicsのSpot
これを模して作られたオープンソースのSpotMicroを作っていきたいと思います。
自己位置推定にはVisualSLAMのORB SLAM3を使用して、最低限のセンサー(カメラ)だけでどこまで行けるのか挑戦していきます。
基本的な内容は以下に全て入っているのですが、3年前ぐらいで更新が止まっており、現在のROS環境に対応できるのかや、visualSLAMベースで動かしている例がないなど、未知数な要素が非常に多いのですが、備忘録的な記録として残していけたらと思います。
https://spotmicroai.readthedocs.io/en/latest/#simulation-software
https://www.thingiverse.com/thing:3761340
モデルはこちらのThingVerseにあるものを使用して、3Dprinterで刷っていきます。
3Dプリントを想定しているはずなのですが、多分にサポート剤を仕込まないと刷れない部分が多く、要注意です。
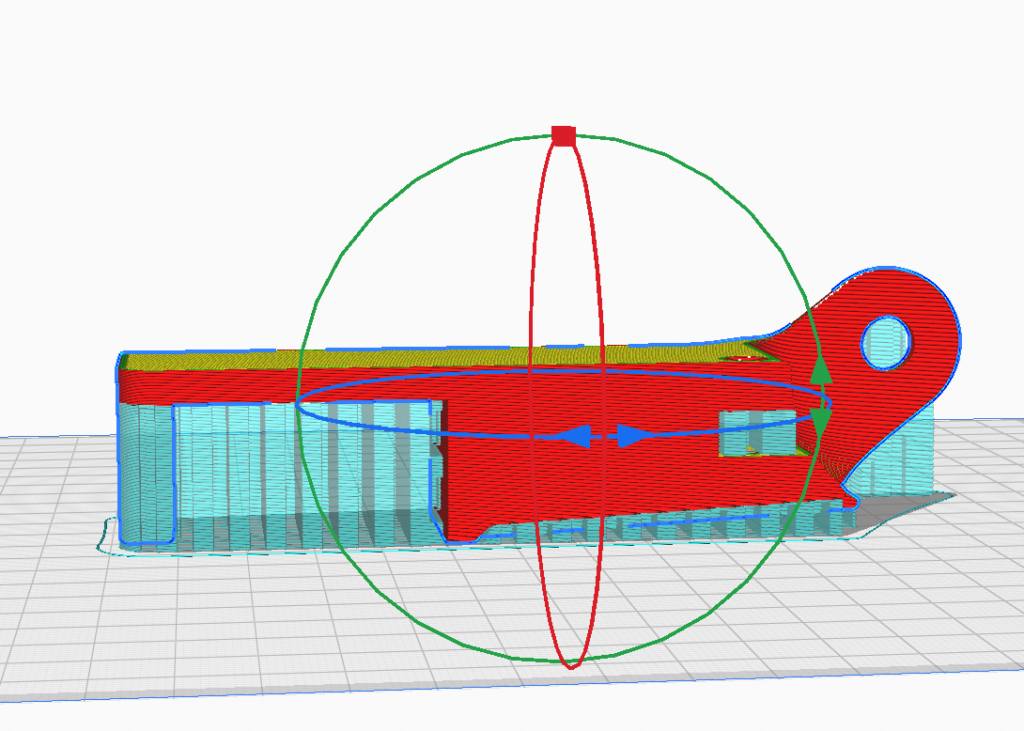
で、できた足がこちら。

全部で40パーツ前後あるので、気長に刷っていこうと思います。
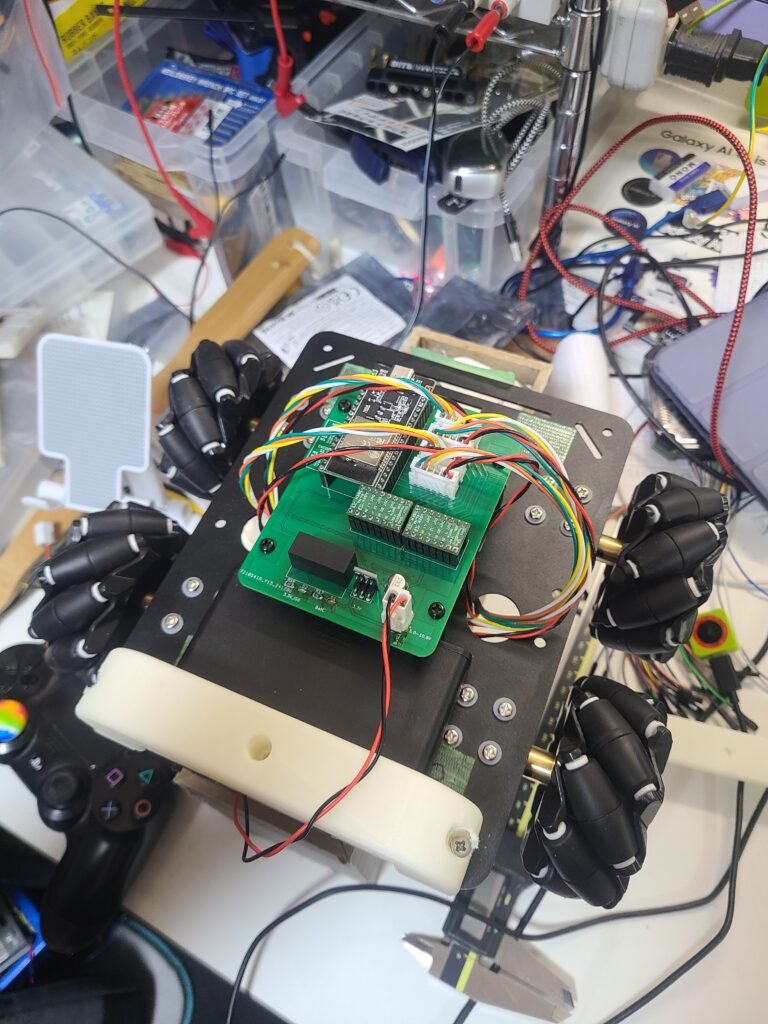
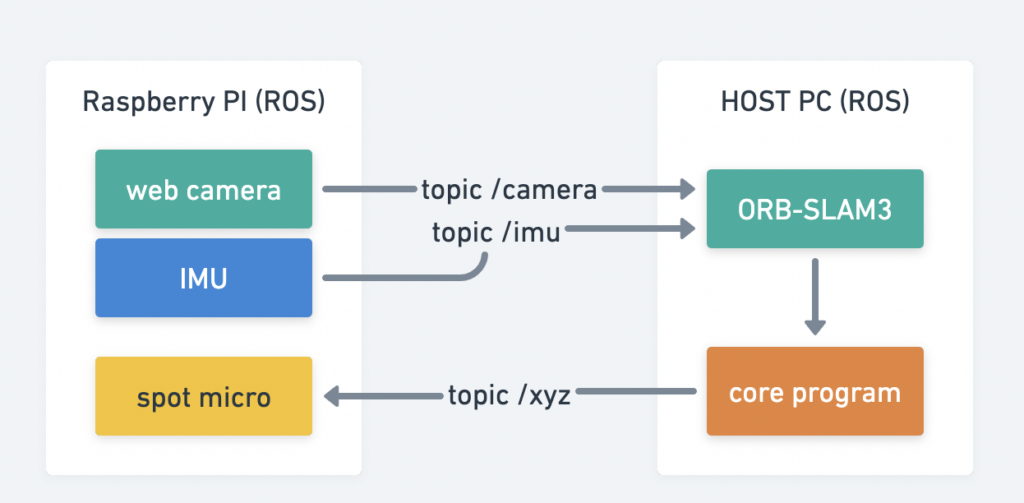
今回はRaspberryPIを制御ボードとする構成を想定しています。
VisualSLAMが重そうなので、そこの部分と経路計画などをPC側で行う様なROSの構成で考えており、図としては以下の通りです。

Y.S.