January 7, 2023
今回は前回作成した機体を動かした結果を投稿します。
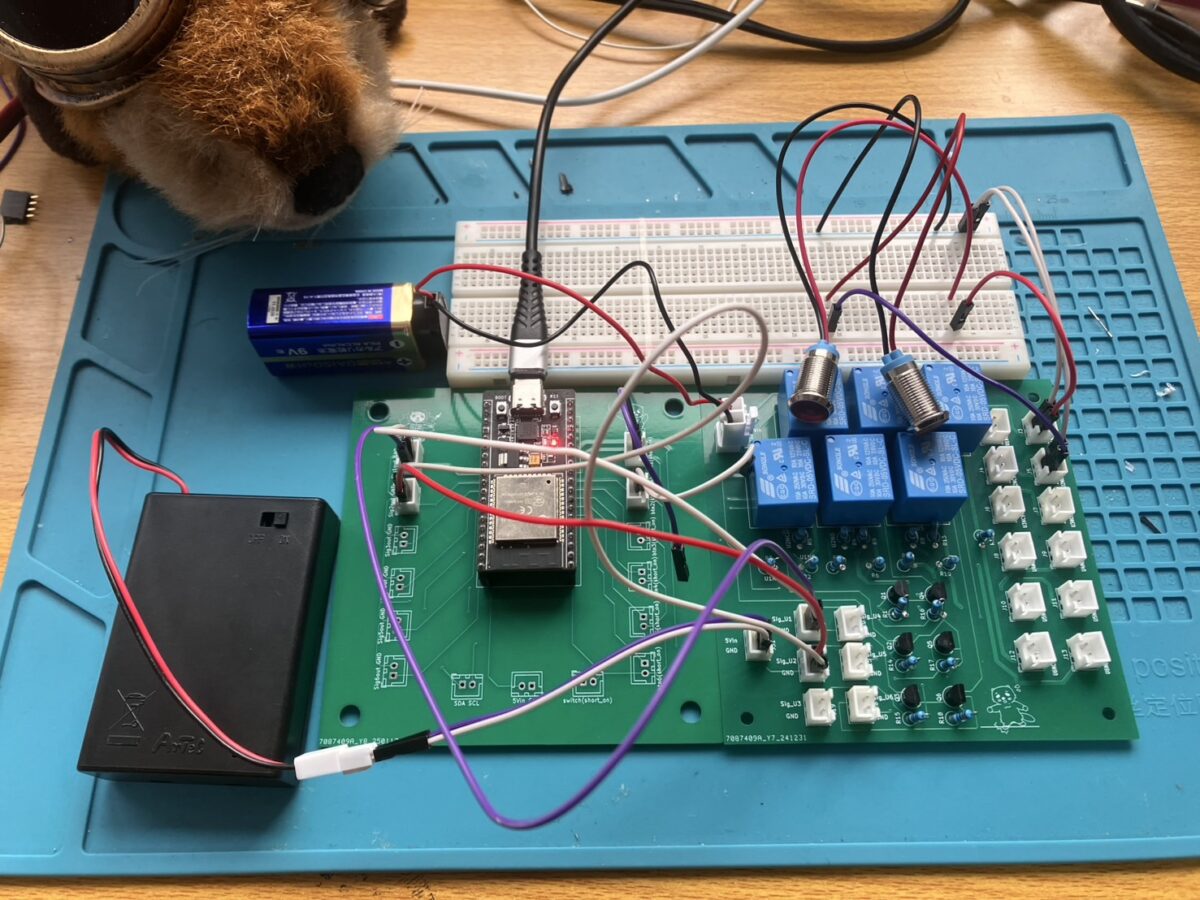
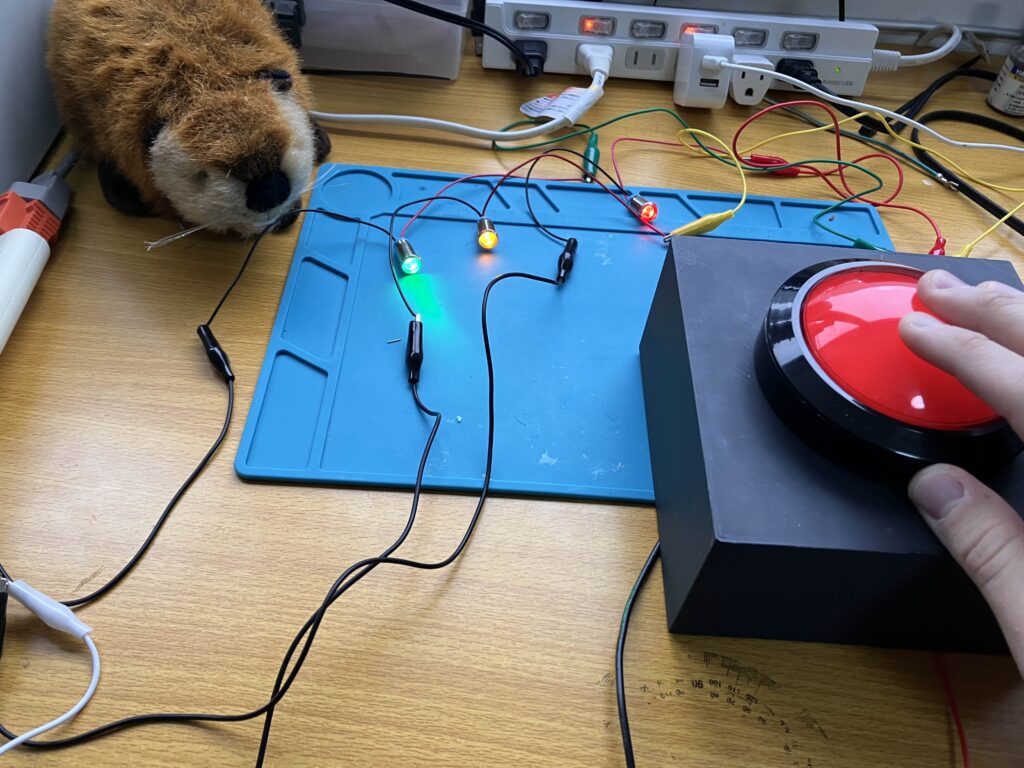
転倒防止のため、ボールキャスターを1個追加して動かしてみました。
左のタイヤの回転速度を少し遅くしてみました。
現在できているのは、ここまでです。今後、エンコーダを用いたDCモータ制御とセンサー(超音波センサ等)を組み合わせて動かしてみたいと思います。
UK
February 2, 2025
January 2, 2025
February 18, 2023
February 5, 2023