今回は「[電子工作No.2]DCモータ制御その2」を応用して作成した、2輪駆動ロボットについて投稿します。
[電子工作No.2] DCモータ制御その2(速度制御) | Beaver'sHive Blog (beavers-hive.com)
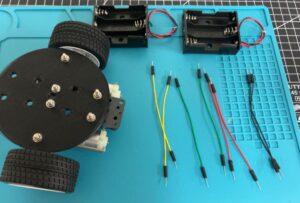
※その他、Arduino nanoとPCをつなぐUSBケーブル、M3(ねじ15mm、ナット、ワッシャー)、はんだごて、はんだ線、配線を束ねるために結束バンドを用意。
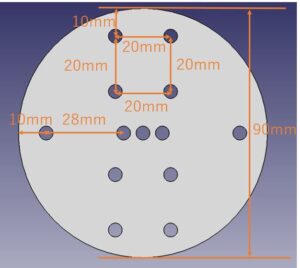
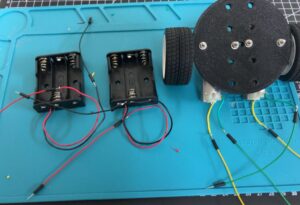
丸い土台に、モータとボールキャスターを取り付けたら、モータの配線と電池ボックスの配線をはんだ付け。
モータの配線ははんだ付けするのすっかり忘れてた…。電池ボックスの配線はすでについていますが、ブレッドボードに刺す先端が弱く、ロボットが動いている間に配線が抜ける可能性があったため、ジャンパー線をはんだ付け。
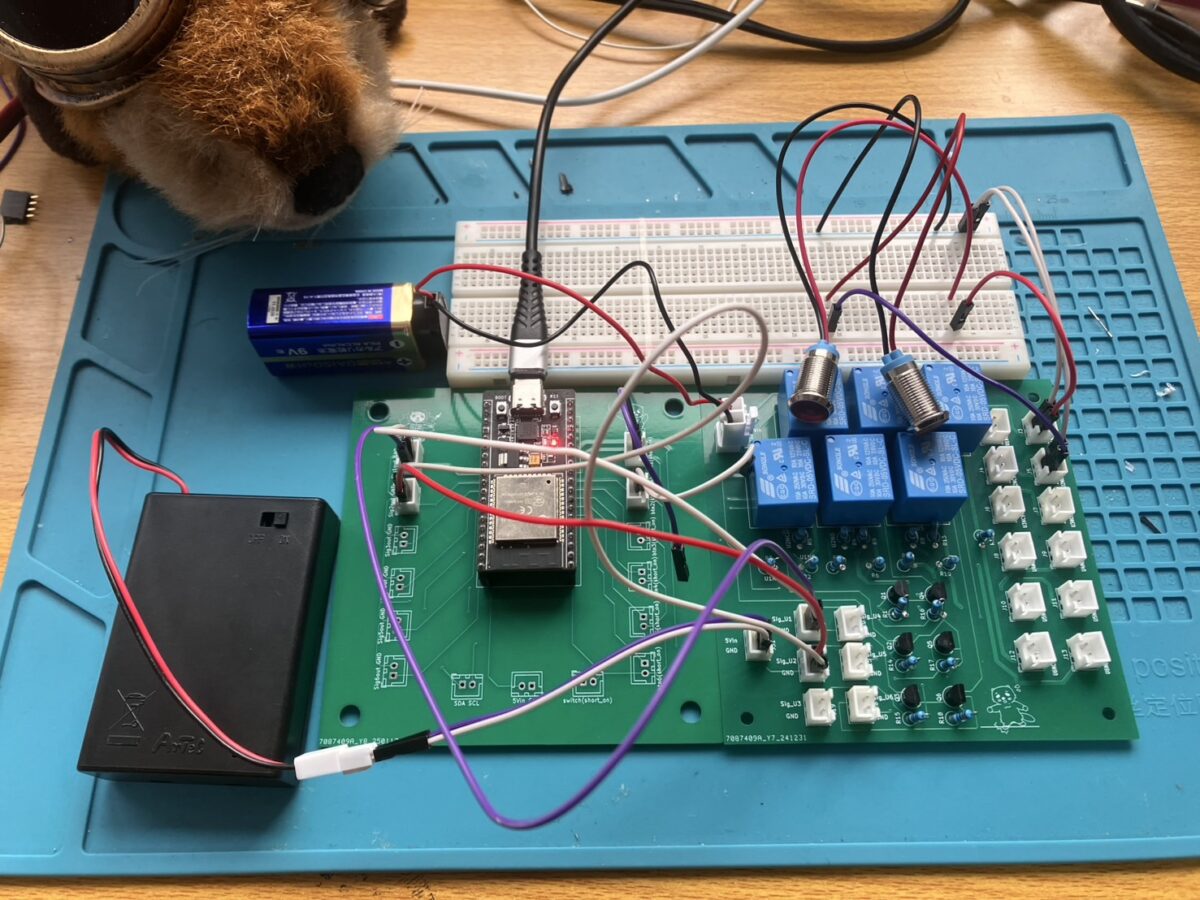
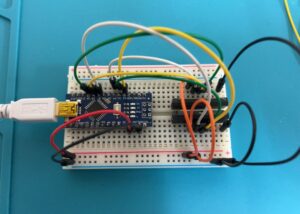
ブレッドボードにArduino nanoとモータドライバを配線。
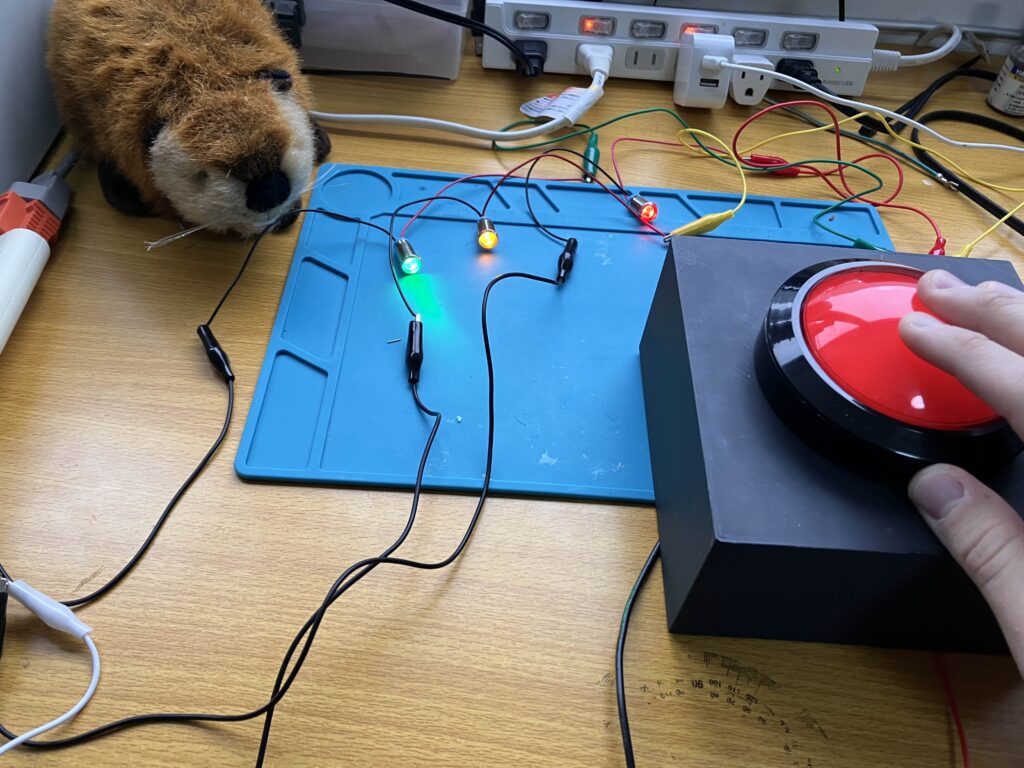
それぞれの部品を合体して完成。
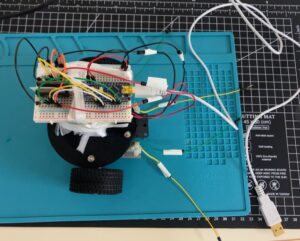
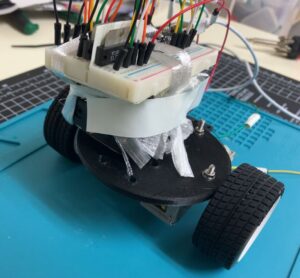
機体が制作できたので、次回は実際の動作について投稿したいと思います。

UK