December 1, 2023
お久しぶりです。久しぶりに更新しました。
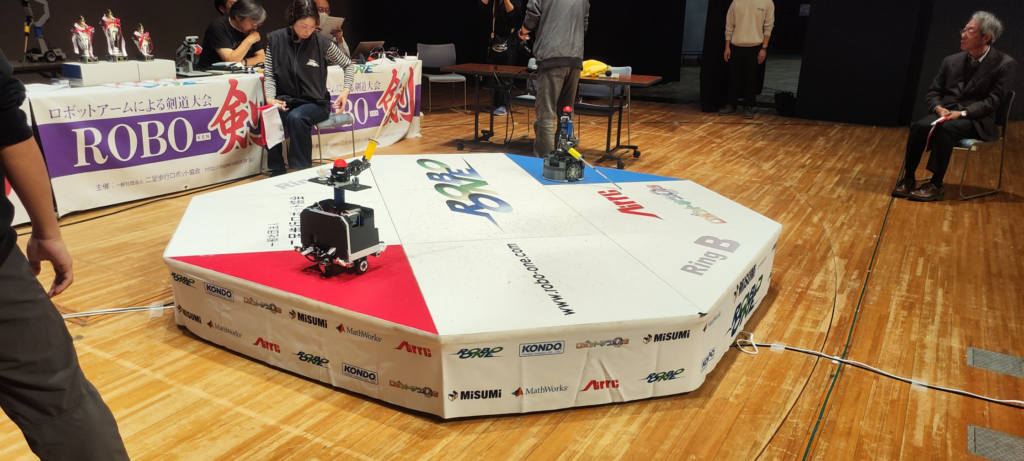
ビーバーズハイブは2023年度第2回新ROBO-剣に参加しておりました。
https://www.robo-one.com/sinkens/index/73
今回はその大会の振り返りをの様子をお送りしたいと思います。
Beaver’s Hiveで出場したロボットは3台あります。それらのロボットについて説明します。
https://www.robo-one.com/rankings/view/1585
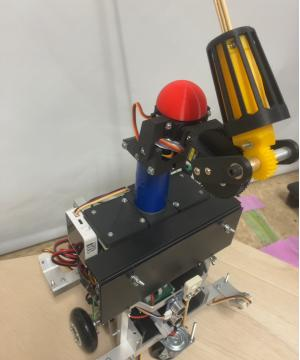
ノイエン3号機は無駄なものは排除し、制御などもシンプルにしながらも、速攻と安定性を重視するコンセプトで構成されました。
車輪はDCモータ2個による3輪構造で、ToFセンサで相手の距離を測りながら、技のコンボを決めるという制御になっています。
床側にもToFセンサが載っており、会場から落ちないようにしています。
竹刀振り下ろしの箇所には、自作の遊星ギアを3Dプリントしたものを使用しており、素早い振り下ろしが可能となっています。
とても安定していたこともあり、全体で4位となり、近藤科学賞も受賞しました!
副賞としてKONDOのマイクロサ➖ボをいただいたので、今後のロボット制作に活用させていただきます。
https://twitter.com/beavers_hive/status/1727587749128286557?s=20

https://www.robo-one.com/robots/detail/1582
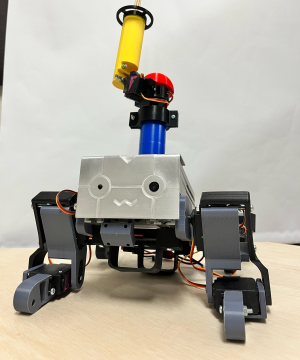
Stoppoは4足歩行型のロボットです。
1つの足ごとに2つのサーボモーターを使用しており、自由に歩行することができます。
サーボにはMG 996 Rを使用しており、足などのサーボマウントの箇所には3Dプリンターで作成したものを使用しました。
外装はアルミ板を使用しており特に顔の部分はCNCを利用して切削加工しています。
メインボードにはラズパイを使用しており、カメラ画像からの色判定と正面についたToFセンサーでの距離判定を使用して攻撃を行う構成となっています。
このロボットで特に苦労した点としては4足歩行の歩容を正しく行い、歩行できるようにする箇所です。
これらの点については他のブログ記事で詳細に解説しておりますので、そちらをご覧ください。
https://blog.beavers-hive.com/archives/575/
こちらのロボットは二回戦目で惜しくも敗退してしまいました。
https://www.robo-one.com/robots/detail/1583
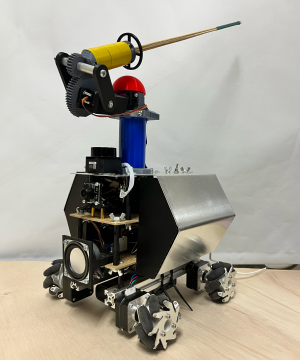
Mechappoは自動制御の部分に力を入れたコンセプトです。
足回りはメカナムホイールを使用しており、ステッピングモーターとの組み合わせで前後左右どの方向にもそのまま移動することができるような形を行っています。
メインボードにはintel N100プロセッサを使用したミニPCを使用しており、高度な情報処理が行えるような形をとっています。
このロボットの特徴としては、カメラから判断した色情報をもとに敵位置を割り出すとともにLiDARを搭載しており、360度における敵の関の位置を検知できるような体制をとっています。
これらのセンサーの組み合わせによって、敵の位置を正確に細く攻撃するような形となっています。
ただ会場におけるライティングの設定がかなり強く、画像からの判定がうまくいかなかった事象が見られました。
こちらに関してはもともと想定はしており、会場に会場においてキャリブレーションを行えるような体制を取ってはいましたが、ロボットから見た角度などによって、光源の位置が変わってしまい、なかなか色をきれいに取ることができなかったようです。
こちらのロボットも二回戦目で惜しくも敗退してしまいました。
様々なコンセプトでロボットを複数作ったことにより、それぞれの特徴、強み弱みなど含めて、さまざまな知見を得ることができました。
今後もROBO-ONE系の大会はもちろん、さまざまなロボットのコンテストなどにも参加していこうと思います。

Y.S.